Robot Operating System (ROS)
1. What is ROS
-
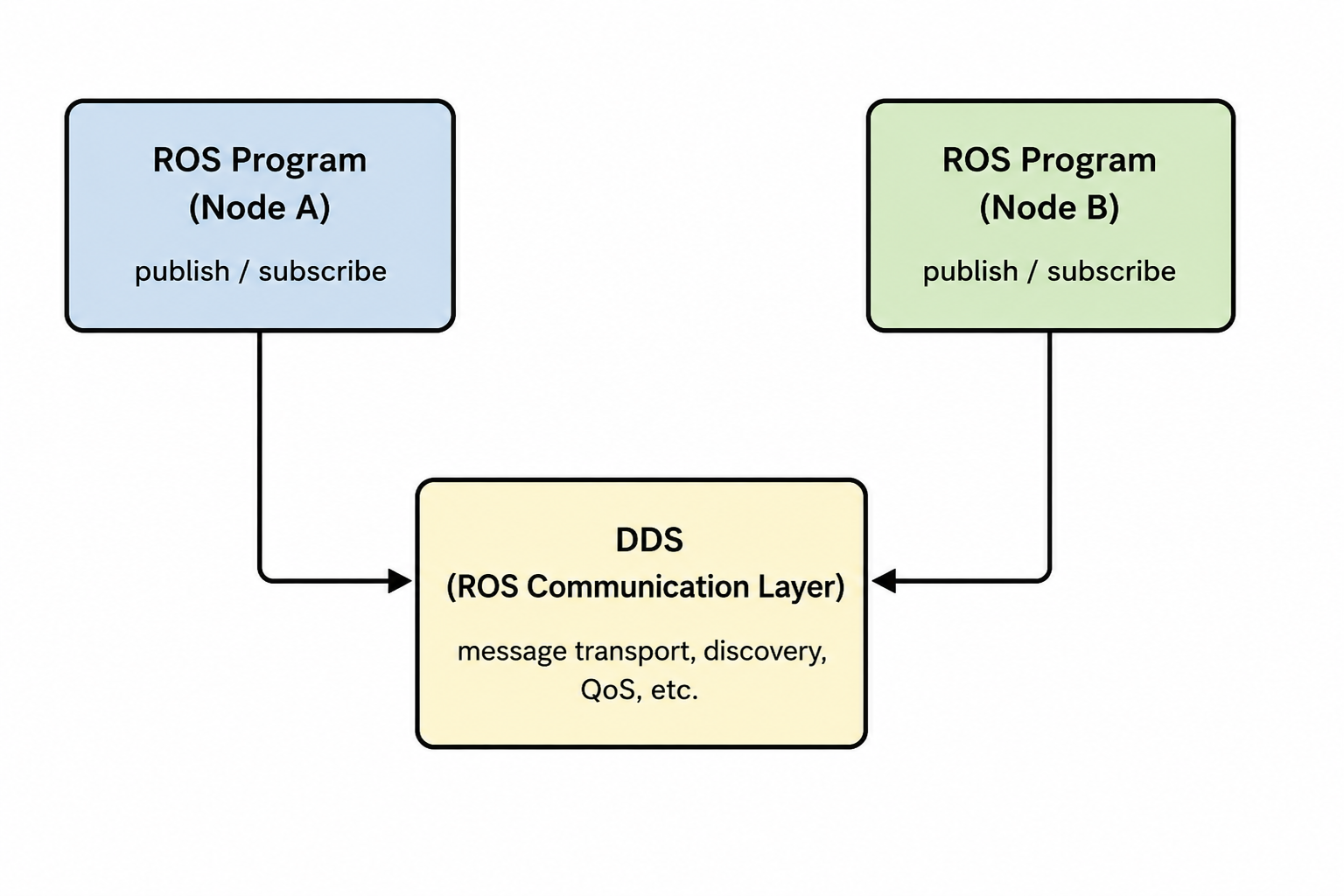
ROS is a robotics software framework that runs on top of an operating system and lets multiple programs work together as a coordinated robot system.
-
ROS is not a real operating system. It does not replace Linux or Windows. It runs on top of an OS, just like a web server or browser application.
-
ROS lets us write programs that run and communicate in a structured way, instead of being independent programs. These programs can easily exchange data, coordinate actions, and work together as a system.
2. ROS is scalable and dynamic
-
These programs (nodes) can be pieces of code that read data from sensors, or code that receives data from other modules, such as robot movement commands.
-
The underlying mechanism is the publisher/subscriber model, which is highly scalable and dynamic (nodes can be added or removed at any time without changing other components).
-
So instead of one big program, ROS splits a robot system into many small, independent programs.
3. ROS inside single/multiple machines
-
ROS is fundamentally a distributed communication framework
-
ROS can run on a single robot computer or across multiple machines and robots connected over a network.
-
ROS can be used in variety of configurations.
3.1 Sinlge machine(robot)
- Most basic configuration
graph TD
Camera[Camera Node]
Motor[Motor Node]
Navigation[Navigation Node]
Sensor[Sensor Node]
Camera <--> Navigation
Sensor <--> Navigation
Navigation <--> Motor3.2 Multiple computers in one robot
- Very common in real robots (such as Yahboom)
Robot
├── MicroROS board (in Yahboom car)-motor,wheels
└── Raspberry Pi (additional board for computing for LIDAR, Camera)
graph TD
Robot[Robot]
MicroROS["MicroROS Board (Yahboom car)\nMotor + Wheels"]
RPi["Raspberry Pi\nLIDAR + Camera"]
Robot --> MicroROS
Robot --> RPi3.3 Multiple robots on same network
- ROS can distribute nodes across:
graph LR
A["Robot A (ROS nodes)"] --> S["Server (ROS nodes)"]
B["Robot B (ROS nodes)"] --> S
S --> C["Control Station (ROS nodes)"]